I am Yuzhou Chen, currently a Robotics & AI Software Intern at Magna International, passionate about building and optimizing foundation models and extending their applications to robotic intelligence, computer vision, and natural language processing. My experience involves developing and optimizing Large Behavior Models, Vision-Language Models (VLMs), and Vision-Language-Action (VLA) models leveraging diffusion and auto-regressive architectures. My primary goal is to enable robots to perform fine-grained dexterous manipulation and navigation tasks with high success rates, smooth and efficient motion, and robust multi-task learning—all while maintaining strong single-task performance, scene understanding, language grounding, and effective failure recovery.
I aim to develop scalable, end-to-end robotic intelligence with advanced visual representations, minimal model redundancy, and low inference latency, pushing generalization to its limits. My interests include tracking cutting-edge advancements in robotics, computer vision, and generative modeling, benchmarking emerging architectures, and deploying them in real-world robotic systems. I am equally focused on parameter efficiency, computation acceleration, resource management, and data pipeline optimization to achieve practical and sustainable deployment. I am deeply enthusiastic about industrial-scale infrastructure building, model optimization, and systems scalability. I am eager to join and contribute to a talented and visionary team where I can push the boundaries of robotic intelligence, accelerate large-model deployment, and transform advanced research into tangible, high-impact applications.

Education
University of Michigan, Ann Arbor
M.S. in Electrical and Computer Engineering• Focused on Machine Learning, GPA: 3.76/4.0
M.S.E. in Mechanical Engineering
• Focused on Robotics and Mechatronics, GPA: 3.76/4.0
Aug 2022 – May 2025

Jilin University, Changchun, China
B.E. in Mechanical Engineering• Focused on Robotics and Mechatronics, GPA: 87.1/100
Aug 2018 – Jun 2022

Skills
Programming Languages
Python, C++, HTML/CSS, C, SQL, MATLAB, JavaScript, Arduino
MLOps and Software Tools
Deep Learning: PyTorch, GPyTorch, JAX, TensorFlow
Data Science: NumPy, Pandas, OpenCV, matplotlib, scikit-learn
Robotics/Simulation: ROS, IsaacSim, MuJoCo
RL Libraries: Gym, Stable-Baselines3
Cloud & DevOps: Docker, AWS EC2/S3, Git
Engineering & Simulation Tools
ANSYS / Workbench, Abaqus, SolidWorks, UG NX, CATIA, AutoCAD, Mathematica, LaTeX
Projects
Bayesian Optimization for Learning-Based Multi-Body Manipulation |
|
|
Learned multi-body dynamics where a robot uses an intermediate object to push a target object to a goal, and applied Model Predictive Path Integral (MPPI) control enhanced with Bayesian Optimization for efficient trajectory planning. |
|
Obstacle free
|
Obstacle awearness
|
Learning-Based Robot Planning with PPO and Diffusion Policy |
|
|
Implemented and compared Proximal Policy Optimization (PPO) and Diffusion Policy for robot motion planning and control, focusing on continuous action spaces in manipulation tasks. |
|
PPO
|
Diffusion Policy
|
3D Semantic Perception for Robotics in Simulated Aircraft Cabins |
|
|
Developed a simulation pipeline in IsaacSim to enable robotic perception in cluttered cabin environments. |
|
3D Reconstruction
|
Environment in IsaacSim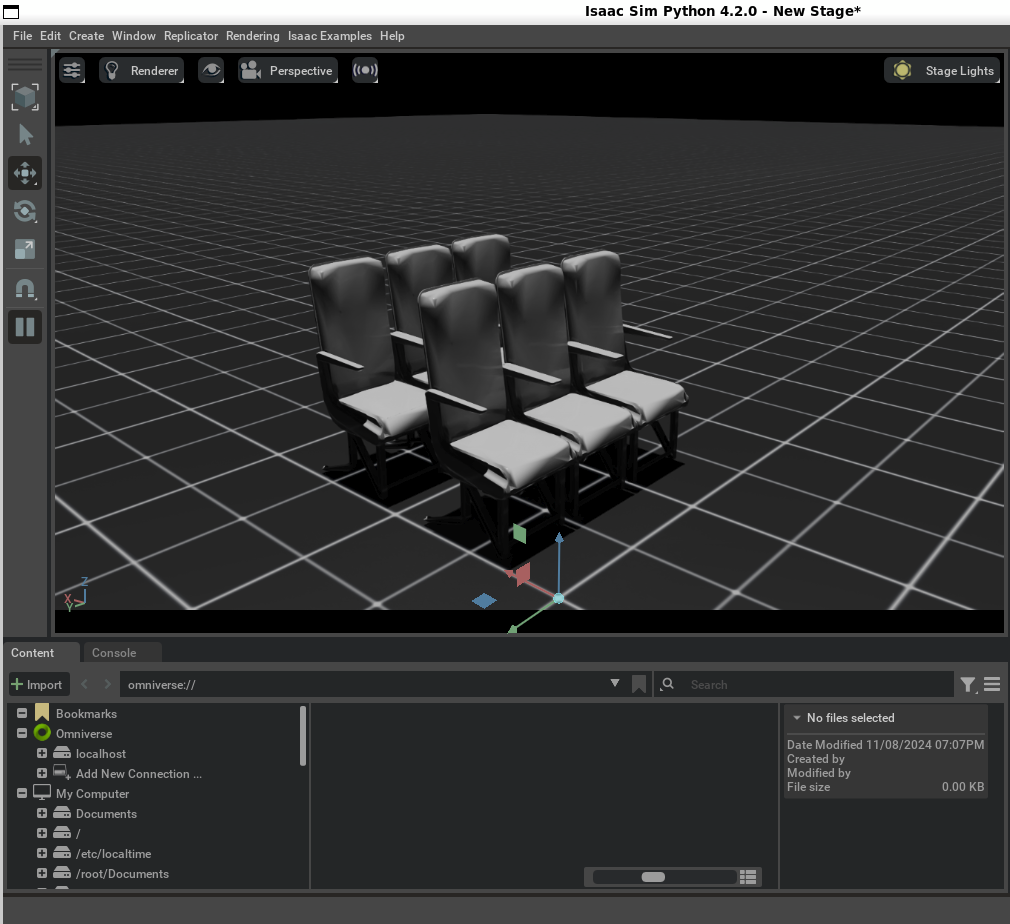
|
Vision-Based Robot Control in Latent Space |
|
|
Encoded raw image observations into a latent space using a Variational Autoencoder (VAE), then applied Model Predictive Path Integral (MPPI) control in the latent space. |
|
VAE Latent Control Demo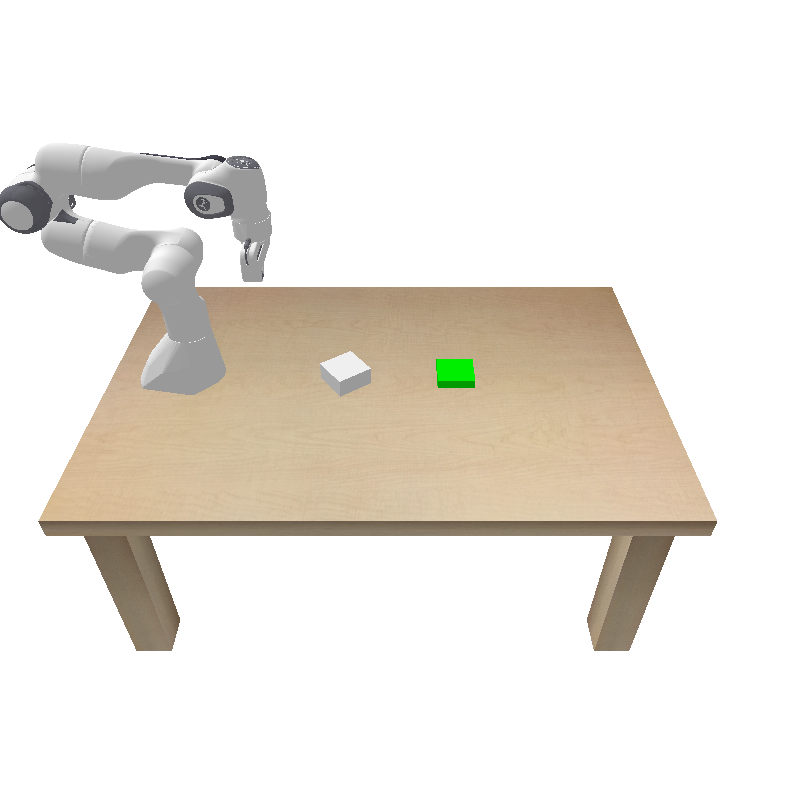
|
State Image Input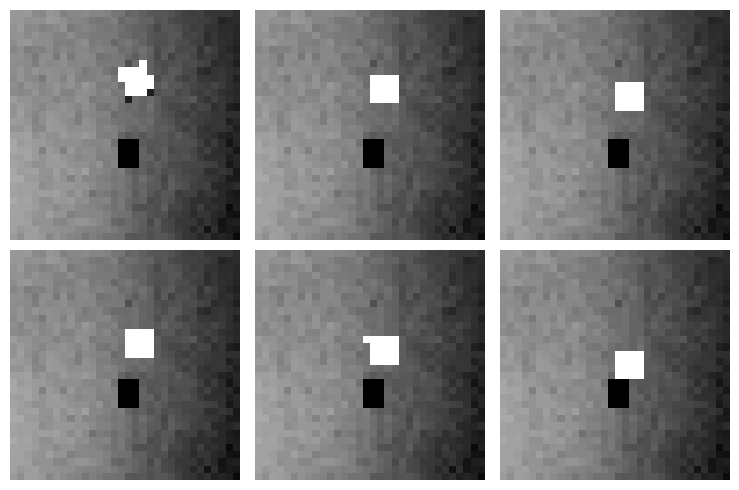
|
Gaussian Process Based Robot Pushing with Obstacle Avoidance |
|
|
Implemented Gaussian Process (GP) to capture uncertain system dynamics, and applied Model Predictive Path Integral (MPPI) to enable obstacle-aware object pushing under uncertainty. |
|
GP-Based Pushing Demo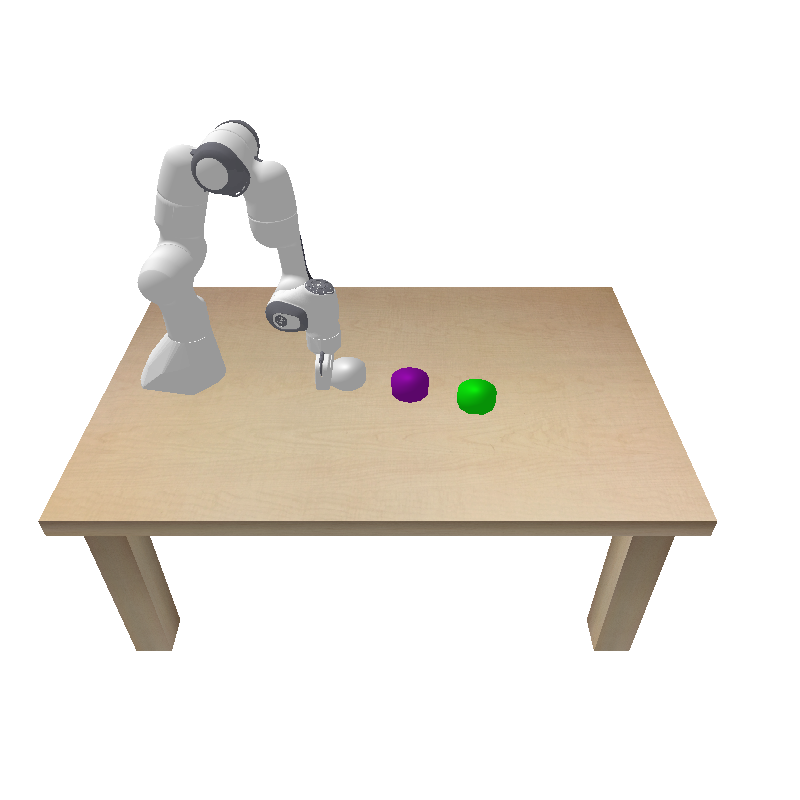
|
Prediction with GP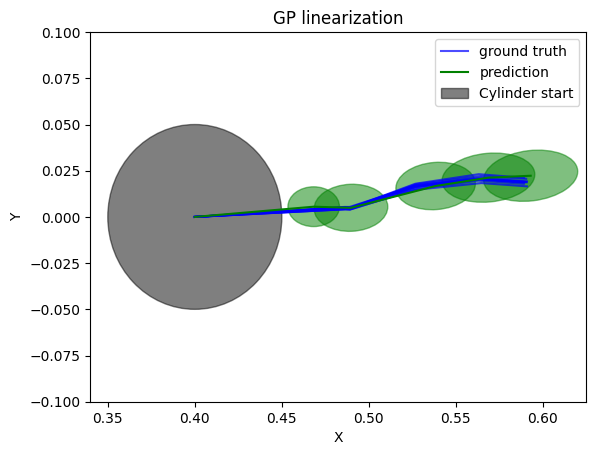
|
BotLab Autonomous Mobile Robot |
|
|
Differential-drive robot with 2D LiDAR for autonomous block transport and navigation, integrating SLAM and A-star planning. |
|
Auto-navigation
|
SLAM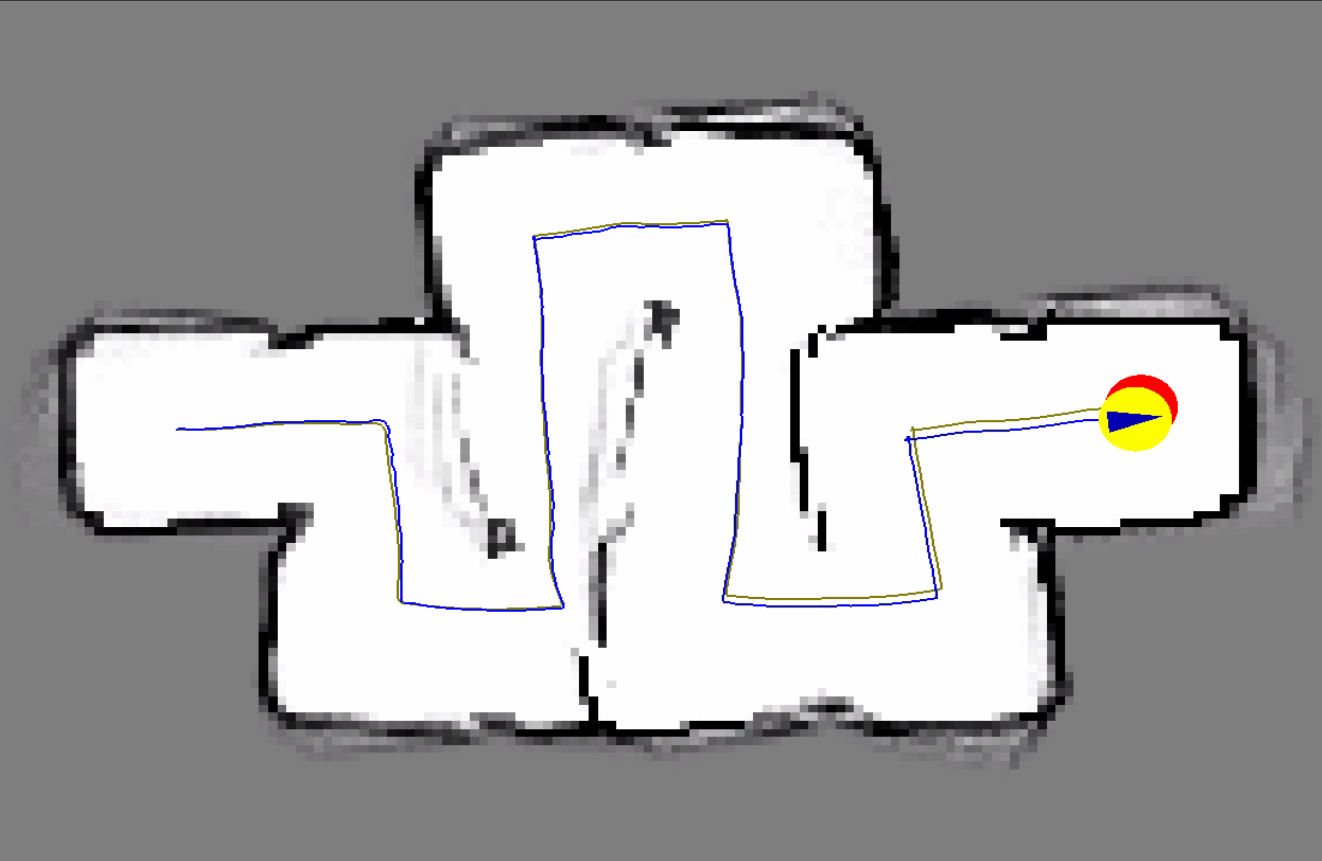
|
ArmLab 5-DOF Robotics Suite |
|
|
Building autonomy for a 5-DOF robotic arm using computer vision, forward and inverse kinematics, and path planning to manipulate various objects. |
|
Auto-stacking
|
Environment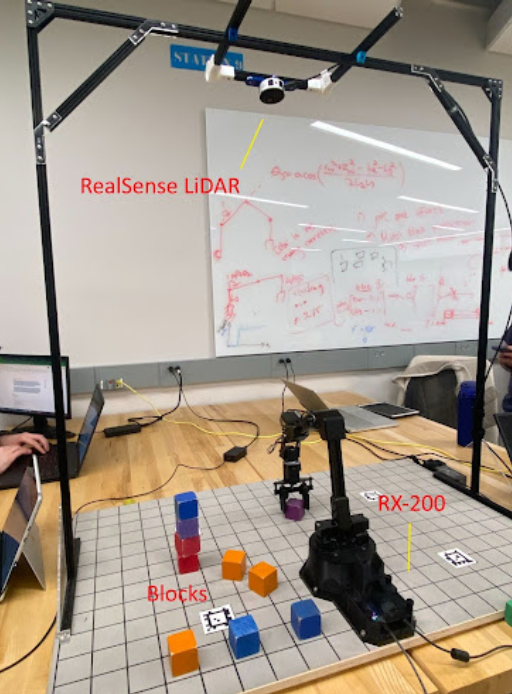
|
Sequential Manipulation in PyBullet |
|
|
Reasoning with pushing and grasping actions to build towers from objects in simulation using programmable primitives. |
|
|
Autonomous Racing & Obstacle Avoidance |
|
|
Control strategies for high-speed racing with embedded obstacle avoidance mechanisms. |
|
|